

マルチコアRTOS設計における実装前検証― chronSUITEによるタスクタイミングの可視化 ―
連載「組込みシステムにおけるマルチコア  」は、第4回で一旦の区切りとしました。これまでのコラムでは、マルチコア化に伴う設計上の考え方や、RTOSを用いた際の注意点について整理してきました。
」は、第4回で一旦の区切りとしました。これまでのコラムでは、マルチコア化に伴う設計上の考え方や、RTOSを用いた際の注意点について整理してきました。
一方で、連載終了後も、以下のような実務寄りのご質問をいただくことがあります。
- 「設計内容が実際のタイミング要件を満たしているか、どう確認すべきか」
- 「マルチコア環境でのタスク動作を、実装前に検討する方法はあるのか」
本コラムはそうした声を受け、連載本編を補足する番外編として、マルチコアRTOS設計を「実装に入る前」の視点から捉えるアプローチを紹介します。
1. はじめに
2.タイミング検証とは
3.イベントチェーンとは
4.chronSUITEとは
4.1 chronVIEW — 実機タイミング検証
4.2 chronSIM — シミュレーションによる設計段階タイミング検証
5.AUTOSAR Classic 環境でのタイミング課題
課題① 静的コア割り当てによる負荷偏り(AUTOSAR Classic / static scheduling系)
課題② race condition / cache coherence / spinlock による散発的障害
課題③ イベントチェーン全体のエンドツーエンド遅延と非決定化
6.なぜ「設計段階」のタイミング検証が重要なのか?
7.chronSIM による設計時タイミング解析
8.chronVIEW による実機タイミング解析
9.今後の SDV 時代でさらに重要になる理由
10.まとめ
1. はじめに
2025年10月にスタートした連載コラム「組込みシステムにおけるマルチコア」は、並列処理の基礎からマルチコアのハードウェア特性、並列化の限界と対策、実践的なコア割り当てや排他制御の考え方まで、全4回にわたって解説しました。
処理性能や柔軟性が向上するなどのメリットがあるマルチコア化ですが、その一方で、タスク同士の干渉や実行タイミングの把握が難しくなるという課題も抱えています。
特にリアルタイムシステムでは、「機能が正しく実装されているか」だけでなく、「決められた時間内に処理が完了するか」が重要となりますが、タスクが並列に実行されるマルチコア環境では、設計段階で実際の動作タイミングを正確にイメージすることは容易ではありません。
本コラムでは、こうした課題に対して、実装前にマルチコア上のタスク動作をシミュレーションするというアプローチをご紹介します。その具体的な手段として、ドイツINCHRON社のマルチECU/マルチコアECU対応タイミング検証ツール群 chronSUITE を取り上げます。
2.タイミング検証とは
組込みシステムでは「機能が正しく動くか」だけでなく、「決められた時間内に処理が完了するか」を確認するタイミング検証が重要です。
タイミング要求には大きく分けて、タスク時間検証とイベントチェーン時間検証の2種類があります。
- タスク時間検証:10ms周期タスクは必ず10ms以内に終了しなければならない
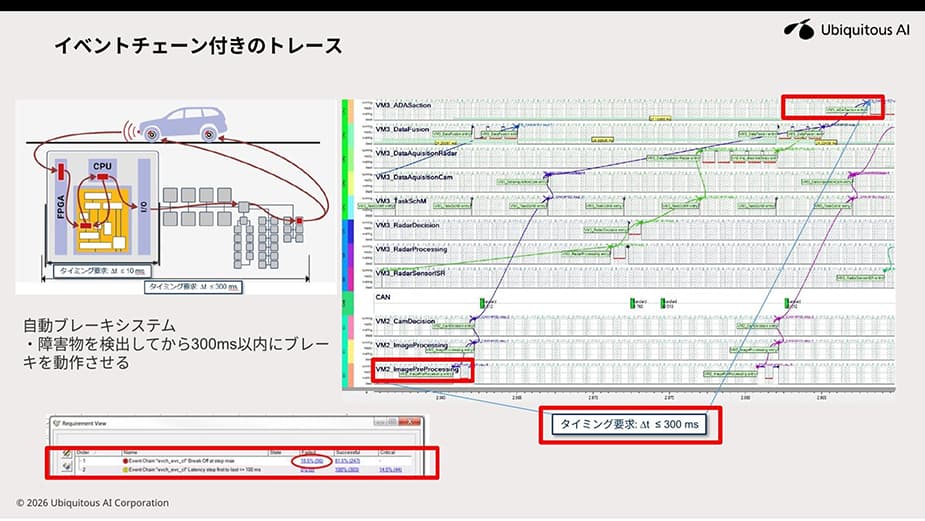
- イベントチェーン時間検証:ADASシステムで、レーダーが障害物を検出してから300ms以内にブレーキを作動させなければならない
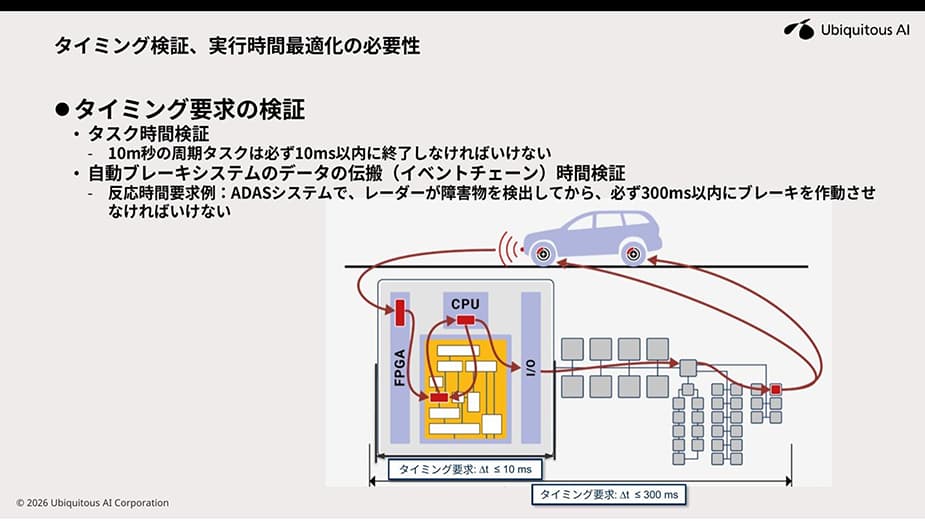
タイミング要求の概念(タスク単体∆t≤10ms、エンドツーエンド∆t≤300ms)
タイミング要求は、ヘッドライト制御・ボディ系・シャーシ制御・ADAS・IVI など車載システムのあらゆる領域に存在します。
3.イベントチェーンとは
イベントチェーンは、センサー入力からアクチュエーター出力までの一連の処理の流れです。単一タスクの実行時間ではなく、複数のECU・タスク・通信バスをまたがるデータの伝搬全体を「チェーン」として把握・管理します。
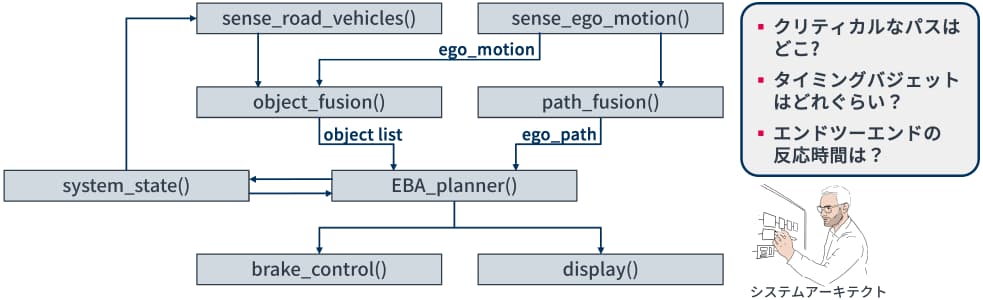
システムが複雑になるほど、個々のタスクの実行時間を見ているだけでは全体の遅延は把握できません。クリティカルなパスはどこか、タイミングバジェットはどれくらいか、エンドツーエンドの反応時間は何msかを把握するためには、イベントチェーン全体を俯瞰する必要があります。
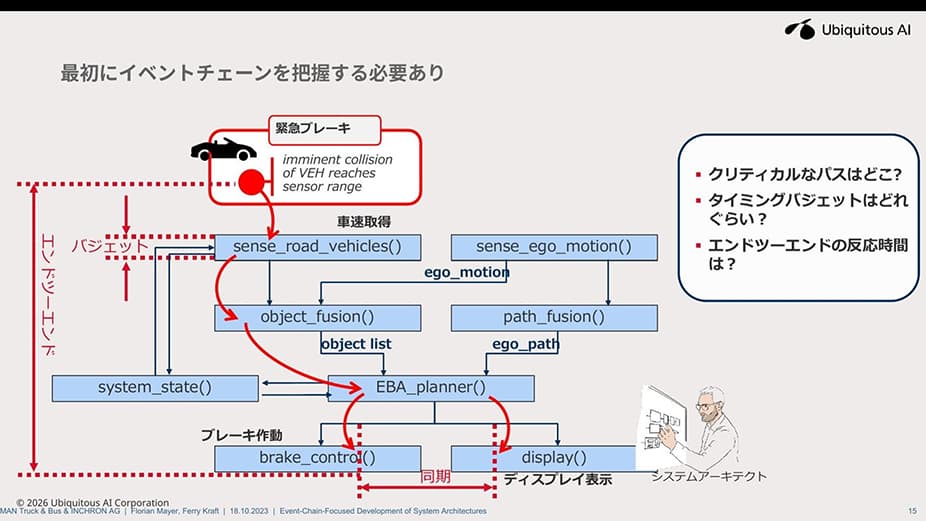
イベントチェーンの把握(緊急ブレーキシステムの例:センサー→融合→EBA計画→ブレーキ作動)
複数コアにまたがる複雑なイベントチェーンは、chronSUITEを使うことにより自動で可視化・解析できます。tstart〜tendのエンドツーエンドタイミングは、コアごとのタスク実行タイムラインと重ね合わせて確認することが可能です。
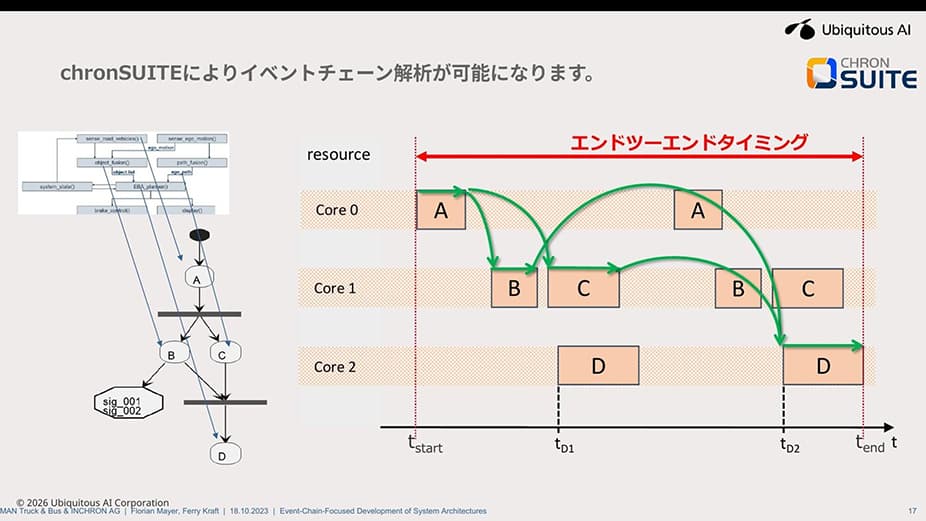
イベントチェーンの把握(緊急ブレーキシステムの例:センサー→融合→EBA計画→ブレーキ作動)
4.chronSUITEとは
chronSUITEは、設計段階から実機テストまでを一貫してカバーする2つのツール、「chronVIEW」と「chronSIM」で構成されるリアルタイムシステム向けタイミング検証ツール群です。
4.1 chronVIEW — 実機タイミング検証
実機ECUのトレースデータを取り込んでタイミング挙動を詳細に可視化・解析するツールです。Lauterbach TRACE32・iSYSTEM・ETAS・Gliwa T1など主要デバッグツールのトレース形式に幅広く対応しています。
- タスク・ISR・Runnableの実行タイムラインをコア別に同期表示
- イベントチェーンのエンドツーエンド遅延を自動計測し、タイミング要件への適合を検証
- 最悪・最良・平均実行時間、ジッタをコアごとに統計解析
- まれにしか起きない散発的な遅延超過・タイミング不具合を特定
chronVIEWによる実機トレース
chronVIEWは、現場で広く使われているLauterbach TRACE32などの各種デバッガ・トレースツールからのトレース情報の取得・インポートを特長とし、これにより既存の開発環境を活かしながら、タイミング解析機能を追加できます。
4.2 chronSIM — シミュレーションによる設計段階タイミング検証
実機がなくても設計段階でタイミング挙動をシミュレーションできるツールです。タスク情報からタイミングモデルを作成したり、AUTOSAR ARXML・DBC・FIBEX・APP4MC AMALTHEAなどからタイミングモデルを自動構築したりすることも可能です。コア割り当てやスケジューリングの影響を事前に評価できます。
- AUTOSAR ARXMLなどから自動インポートしてタイミングモデルを構築
- コア割り当て変更・タスク優先度変更・通信追加の影響を設計段階でシミュレーション
- イベントチェーン全体のエンドツーエンド遅延・ボトルネックを実機前に数値化
- What-if解析:機能追加時の負荷増加などのシナリオを事前に検討
車載ECUソフトウェアの制御ではAUTOSARが使われるケースがありますが、その影響はマルチコア環境においても例外ではありません。次章では、AUTOSAR Classic環境における代表的なタイミング課題を整理します。
5.AUTOSAR Classic 環境でのタイミング課題
課題① 静的コア割り当てによる負荷偏り(AUTOSAR Classic / static scheduling系)
AUTOSAR Classic 環境では、開発時にtask・runnable・ISR などの実行配置を静的決定します。つまり、事前に「どの処理をどのコアで動かすか」を固定する必要があります。
しかし実際には、想定以上の割り込み・通信負荷増加・特定機能の高負荷化などにより、一部コアだけが過負荷になるケースがあります。その結果、デッドライン超過・応答遅延・ジッタの増大が発生します。
| 図 1:静的コア割り当てによる負荷偏り | ||
|---|---|---|
| コア | 割り当てタスク | CPU使用率 |
| Core 0 ⚠ | センサー処理 / ADAS / 通信 / ログ記録 | 95% ← 高負荷!デッドライン超過リスク |
| Core 1 ✓ | ボディ制御のみ | 30% 余裕あり |
| Core 2 ✓ | (未割り当て) | 10% ほぼ未使用 |
| 設計段階でコア割り当てをシミュレーションすることで、実機テスト前に負荷を均等化できます。 | ||
静的配置では特定コアに処理が集中しやすく、実行時の動的な再割り当てができません。
⚠ 課題①:静的コア割り当てによる負荷偏り
コア割り当ては開発時に静的決定され、高負荷条件でのコア過負荷・デッドライン超過を実機前に把握できない。
✓ chronSIMによる解決
- AUTOSAR ARXML からタイミングモデルを自動構築
- スケジューリング・リソース競合を考慮した解析で、コア割り当てや変更の影響を設計段階でシミュレーション・評価
課題② race condition / cache coherence / spinlock による散発的障害
マルチコアでは、複数処理が並列実行されます。その結果、競合状態・キャッシュ整合性の問題・スピンロック競合・リソース競合 などが発生します。
「Core0 の更新が Core1 に即時反映されない」「ロック待ちで処理順序が変化する」「割り込みのタイミングで挙動が変わる」といったことが重なり、再現困難な散発障害につながります。
| 図 2:並列実行による実行順序の非決定化(2周期表示)イベントチェーン: A → B → C / Core 0: TaskA / Core 1: TaskB, TaskC / 縦軸: Core 横軸: 時間 | |
|---|---|
 | |
| 実行 #1 (ある日の実行)A完了後にBが起動 → イベントチェーンが1周期内で完結 | |
 | |
| ✓ E2E遅延:7ms(周期1+TaskCで完結) | |
| 実行 #2 (同一入力・翌日の実行)A完了前にBが起動 → Aのデータが未着のままBが動作 → 次周期のBが処理 → チェーン延伸 | |
 | |
| ✗ E2E遅延:10ms(次周期まで延長・約1.4倍) |
同一の入力・同一コードでも、実行のたびにタスク完了順序と遅延が変わります。これが再現困難な散発障害の根本原因です。
| 図 3:状態空間爆発 ─ シングルコアとマルチコアの比較 | |
|---|---|
| シングルコア逐次実行・順序固定 | マルチコア並列実行・順序変動 |
| 実行パターン:A → B → C(常にこの順序) | 実行パターン:A → B → CA → C → B ← 変動B → A → C ← 変動…他多数 |
| 割り込み:予測可能 ロック競合:なし キャッシュ:1コア分 | 割り込み:非決定的 ロック競合:多発 キャッシュ整合性:複雑 |
| ✓ テストで網羅可能 ✓ 再現性あり ✓ デバッグしやすい | ✗ 全パターンテスト不可 ✗ 1000回に1回だけ再現 ✗ ログだけでは原因不明 |
| 並列化によって「取りうる実行パターン数」が爆発的に増加 → 設計段階でのシミュレーション検証が不可欠 | |
並列化により取りうる実行パターン数が爆発的に増加し、網羅的なテストが困難になります。
⚠ 課題②:並列実行による散発的障害・非決定化
race condition / キャッシュ整合性 / スピンロック競合による散発的障害は、実機での再現は非常に困難
✓ chronVIEWによる解決
- 複数コアのタスク / タイムラインを同期表示し、コア間のタイミング関係を把握
- プリエンプション・IRQ・タイミングジッタ等を可視化し、実機上のタイミングの振る舞いの解析を支援
- 最悪 / 最良 / 平均実行時間・ジッタをコアごとに統計解析
課題③ イベントチェーン全体のエンドツーエンド遅延と非決定化
近年のECUでは 、センサー入力 → 信号処理 → 通信 → アクチュエーター出力 のようなイベントチェーンが複数コアにまたがります。コア間通信・コア間割り込み・キャッシュ同期・バス競合 などのオーバーヘッドが各コア間で発生し、エンドツーエンド遅延が増加・変動します。
| 図 4:マルチコアにまたがるイベントチェーンの遅延要因 | |
|---|---|
| 【Core 0】センサー入力 → 信号処理実行時間: 3ms | |
| ↓コア間通信(IOC)(+1.5 〜 3ms 変動) | |
| 【Core 1】フュージョン処理実行時間: 5ms | |
| ↓キャッシュ同期 / バス競合(+0.5 〜 4ms 変動) | |
| 【Core 2】アクチュエーター制御実行時間: 2ms | |
| 設計値(合計)10ms | 実測最悪値(変動含む)16ms(1.6倍) |
コア間通信・同期のオーバーヘッドが積み重なることで、エンドツーエンド遅延が設計値の1.6倍に達する場合があります。
⚠ 課題③:マルチコアにまたがるエンドツーエンド遅延の増大・変動
コア間通信・割り込み・キャッシュ同期・バス競合が累積し、エンドツーエンド遅延が設計値から大きく乖離する。
✓ chronSIM + chronVIEWによる解決
chronSIM:設計段階
- イベントチェーン全体のエンドツーエンド遅延を解析し、タイミング上のボトルネック可視化を支援
chronVIEW:実機検証
- 複数コアをまたがるイベントチェーンのエンドツーエンド遅延を実機トレースから解析
6.なぜ「設計段階」のタイミング検証が重要なのか?
これまでは、実装後に実機テストで問題を発覚させるアプローチが一般的でした。しかしマルチコアでは、問題発見が後工程になるほど原因の特定・修正・再検証のコストが急増するリスクがあります。
| 図5:従来アプローチ vs chronSIM 使用時の開発フロー比較 | ||
|---|---|---|
| 従来アプローチ | chronSIM 使用時 | 改善効果 |
| 実装完了 | ARXML からタイミングモデル構築 | |
| ⬇ | ||
| 実機準備(数週間〜数ヶ月) | マルチコアシミュレーション | ✓ 実機待ち時間ゼロ |
| ⬇ | ||
| 実機テスト | タイミング解析・スケジューラビリティ検証 | |
| ⬇ | ||
| タイミング問題発覚 | 問題を設計段階で解決 | ✓ 後工程の大規模手戻りを回避 |
| ⬇ | ||
| 大規模手戻り・コスト急増 | 実装開始 | ✓ 開発コスト・期間を大幅削減 |
設計段階でのタイミング検証により、後工程の手戻りコストと開発リスクを大幅に低減できます。
7.chronSIM による設計時タイミング解析
chronSIM では、設計の段階でスケジューリング・マルチコア挙動・イベントチェーン・タイミング要件などのシミュレーションが可能です。これにより、コア割り当て変更・タスク優先度変更・通信経路の追加などが与える影響を、実機の完成前に評価できます。
| 図6:chronSIMによる設計時タイミング解析フロー |
|---|
| [ INPUT ]AUTOSAR ARXML / APP4MC AMALTHEA ECU構成・タスク・ISR・Runnable・実行時間を自動読み込み |
| ⬇ |
| [ MODEL ]タイミングモデルの自動構築 タスク依存関係・優先度・周期・デッドラインをモデル化 |
| ⬇ |
| [ SIMULATE ]マルチコアスケジューリングシミュレーション コア割り当て変更・タスク優先度変更・通信追加の影響を検証 |
| ⬇ |
| [ ANALYZE ]スケジューラビリティ / エンドツーエンド遅延 / イベントチェーン解析 CPU利用率・デッドライン適合・遅延ボトルネックを数値化 |
| ⬇ |
| [ OUTPUT ]タイミングボトルネックの可視化 & 設計改善支援 問題箇所を特定し、コア再割り当て等の改善案を提示 |
設計段階でのタイミング検証により、後工程の手戻りコストと開発リスクを大幅に低減できます。
chronSIM によるマルチコア課題の解決
マルチコア移行で生じるタイミング問題を、実機前にシミュレーションで検討できる
⚠ 課題① 静的コア割り当てによる負荷偏り
コア割り当ては静的に決定されるため、高負荷条件下での偏りを事前に把握できない。実機テスト前にどのコアに何を割り当てるかを検証することが困難だった。
✓ chronSIMによる解決
- AUTOSAR ARXML を用いてマルチコア向けタイミング解析モデルを構築
- スケジューリングやリソース競合を考慮したタイミング解析により、潜在的なタイミング問題の早期検討を支援
- コア割り当てやスケジューリング変更の影響を設計段階でシミュレーション・評価
⚠ 課題③ エンドツーエンド遅延と非決定化
コア間通信・キャッシュ同期・バス競合が積み重なり、エンドツーエンド遅延が毎回変動する。設計値と実測値の乖離が実機テスト後まで判明しない。
✓ chronSIMによる解決
- イベントチェーン全体のエンドツーエンド遅延を解析し、タイミング上のボトルネック可視化を支援
- 通信・同期遅延を含む遅延を実機前に算出し、設計値との比較検討が可能
8.chronVIEW による実機タイミング解析
実機完成後は、chronVIEWにより トレース可視化・イベントチェーン解析・タイミング統計・要件評価 などを実施できます。特に ジッタ・遅延のばらつき・散発的タイミング問題 のような問題解析に有効です。
| 図7:chronVIEWによる実機タイミング解析フロー |
|---|
| [ INPUT ]実機ECUトレースデータ(実機から取得) 対応トレースツール: Lauterbach TRACE32 / iSYSTEM / ETAS / PLS 等 |
| ⬇ |
| [ VISUAL ]タイムライン可視化(マルチコア同期表示) task / ISR / runnable の実行タイムラインをコア別に同期表示 |
| ⬇ |
| [ STATS ]タイミング統計解析 最悪/最良/平均実行時間・ジッタをコア別に集計。低頻度変動を検出 |
| ⬇ |
| [ EVAL ]イベントチェーン エンドツーエンド遅延解析 複数コアをまたぐイベントチェーン全体のエンドツーエンド遅延を実測から解析 |
| ⬇ |
| [ VERIFY ]タイミング要件 / 遅延制約 検証支援 chronSIM(設計時解析)と chronVIEW(実機解析)の両輪でタイミング検証を支援 |
実機トレースからタイミング挙動を可視化・解析し、要件検証を支援します。
chronVIEW によるマルチコア課題の解決
実機上のマルチコアタイミング挙動を可視化・解析し、問題の特定を支援
⚠ 課題②:並列実行による散発的障害・非決定化
race condition / キャッシュ整合性 / スピンロック競合による散発的障害は、実機での再現は非常に困難
✓ chronVIEWによる解決
- 複数コアのタスク / タイムラインを同期表示し、コア間のタイミング関係を把握
- プリエンプション・IRQ・タイミングジッタ等を可視化し、実機上のタイミングの振る舞いの解析を支援
- 最悪 / 最良 / 平均実行時間・ジッタをコアごとに統計解析
⚠ 課題③:エンドツーエンド遅延と非決定化
複数コアをまたがるイベントチェーンの実際のエンドツーエンド遅延は、実機トレースを取得するまで把握できない。設計値との乖離が量産直前まで判明しない。
✓ chronVIEWによる解決
- 複数コアをまたがるイベントチェーンのエンドツーエンド遅延を実機トレースから解析
- タイミング要件 / 遅延制約の検証を支援
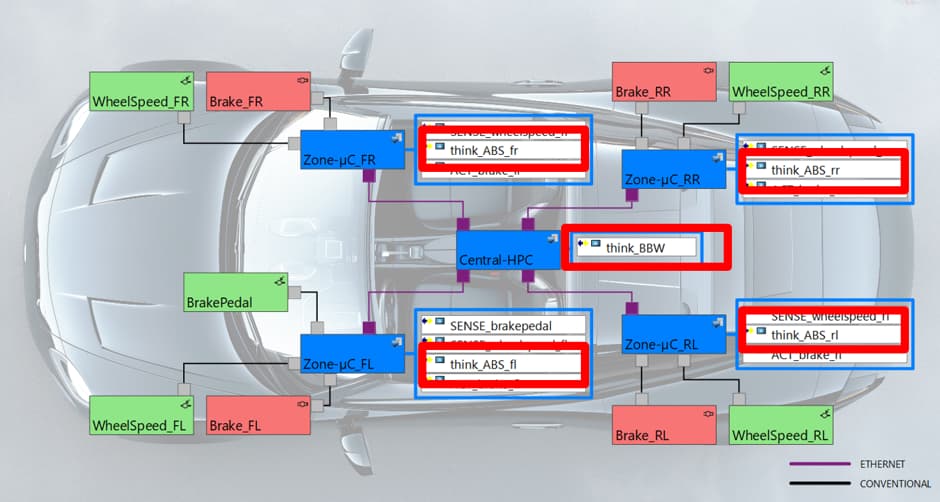
9.今後の SDV 時代でさらに重要になる理由
SDV化が進むに伴い、ECU統合・HPC化・ゾーナルアーキテクチャ・サービス指向通信が普及していきます。その結果、マルチコアだけでなく、複数ECUにまたがる分散システムや仮想化を採用したアーキテクチャとなり、システム全体の複雑度はさらに増します。
このような複雑なアーキテクチャになればなるほど、実機だけのタイミング検証はますます困難になります。設計段階での chronSIM によるシミュレーション解析と、実機フェーズでの chronVIEW によるトレース解析を組み合わせることで、今後さらに複雑化するシステムのタイミング問題に対応していくことができます。
10.まとめ
マルチコアECUでは、静的コア割り当て・並列実行・イベントチェーン 分散によって、タイミング問題はこれまで以上に複雑化しています。非決定化・ジッタ・エンドツーエンド遅延のばらつきなどは、実機だけでは解析が難しいケースが増えています。
| ツール | 主な対象フェーズ | マルチコアでの主な役割 |
|---|---|---|
| chronSIM | 設計段階(実機前) | コア割り当て・スケジューリング・エンドツーエンド遅延を実機前にシミュレーション・評価 |
| chronVIEW | 実機テスト後 | マルチコアトレース可視化・タイミング統計解析・イベントチェーン検証支援 |
chronSUITE は 、chronSIM(設計時解析)と chronVIEW(実機解析)の両輪から、マルチコア時代のタイミング検証を支援します。
このコラムの著者

株式会社ユビキタスAI
エンベデッド第3事業部 担当部長
植田 宏(うえだ ひろし)
大学卒業後Tier1メーカーへ入社、ECUソフトウェア開発を行う。その後海外で組込みソフトウェア開発エンジニアの経験を経て、帰国。1998年より車載系ソフトウェアの技術営業に従事。自身の経験を活かし、課題解決に役立つ海外のソフトウェア商材を取扱い、国内のエンジニアへ届けている。
より詳しく技術や関連製品について知りたい方へ

SDV・マルチコア時代のブレーキ制御ECUに求められるタイミング検証とは
2026.06.09
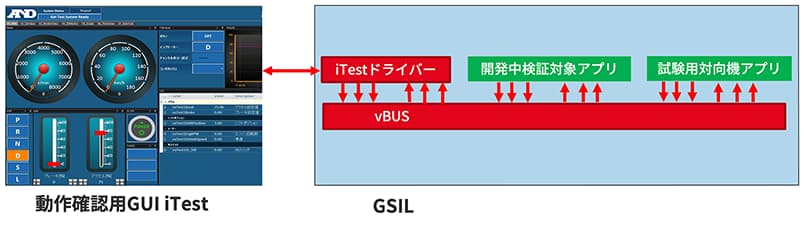
GSILの網羅的自動テストケース生成機能を使ったECUの信頼性向上
2025.04.14

ソフトウェアアプリケーションの実行速度高速化技術
2024.09.04
組込み制御ソフトウェアでのCIの課題と実現方法
2024.09.02
イベントチェーンを応用した車載ECUのタイミング検証
2024.08.30

車載制御ECUソフトウェア教育向けパッケージGTrainerとは
2024.08.08
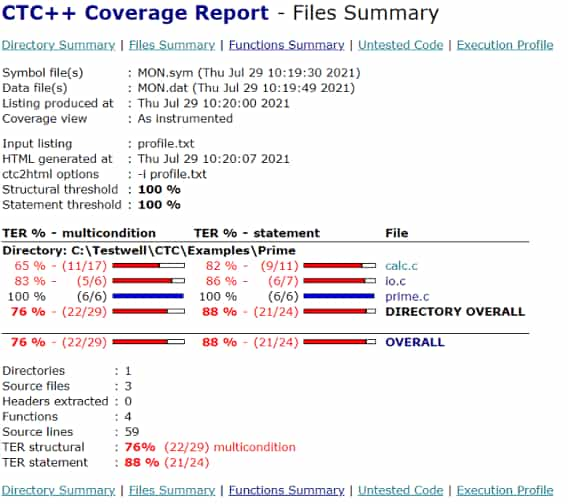
システムテストのカバレッジ測定
2024.06.13
組込み制御ソフト開発へのシミュレーション応用による開発効率向上
2024.06.04
CANを使用したSILSテスト ―車両全体シミュレーション、テストケース再利用―
2024.05.27

GSILのMILS開発への適用
2023.12.20
GSILのCI(Continuous Integration)適用
2023.09.22

OEM⇔サプライヤでのECU制御ソフトウェア環境共有による手戻り工数削減方法
2023.07.25

SILSを使用した車載制御ECUソフトウェア開発競争力強化
2023.07.20

車載ECUシミュレーションでテスト資産を活かすための技術とは?
2022.05.16

早期の車載ECUタイミング検証の実現
2021.08.27
